Research

Robotics and Beyond
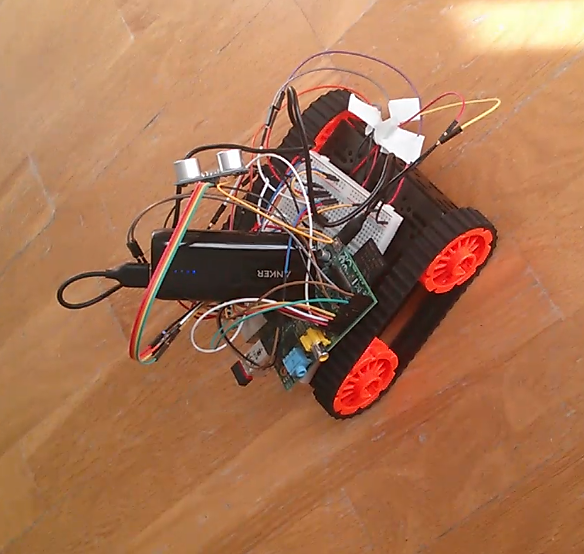
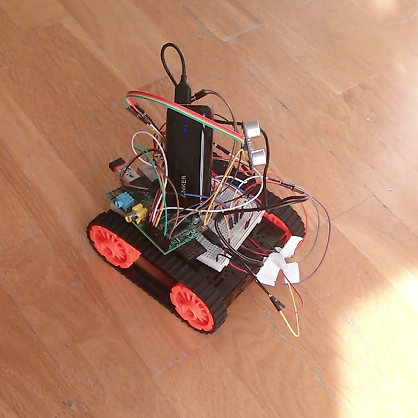
We always do research and create prototypes to generate a basic knowhow on the new trends. Even if the market is very competitive especially when there are major silicon valley companies, who quickly turn new technology ideas into market dominance, we still think these researches, prototypes or proof of concepts are important. The reason for that is the new tech-business ecosystem builds around these newly trended technologies. These prototypes and proof of concepts are mainly software based, but in this example we created something different, a robot, with a distance measurer sensor, applied to Raspberry Pi, and controlled by a simple code written with Python Programming Language, that controls the robot from central computer through a wi-fi. Below is our robot, that we call robot.v.2.0.
The initial idea came when we tried an extention to the basic robot that Lego NXT provides.
We tried to add an extention for the distance sensor we call "the eye", as well as a behaviour dependant on that sensor, rather than the robot just receiving messages on which direction to go. We wanted it to behave autonomously in case there was something on its way, such as taking proactive action and turning left or right before it hits to that object. However we had to look at the (un)official documents of Lego NXT, to understand how to read the values from the distance sensor, so that we could use it in our code. That was a bit of a challange, but we overcame that problem. When our robot was changing direction when it saw something on the way, our aim succeeded. However we weren't satisfied. Below is the father of our robot robot.v.2.0. We call it robot.v.1.0.

The making of a robot
Robotv.1.0 was what we wanted to do initially, however, since our dependency on the Lego NXT product, and the product's some limitations, we wanted to create our own product independently. We wanted to achieve the same thing. Along with Raspberry Pi, we baught sensors and also a chasis and some other apparats to start building of our own. Below is a photo taken during our testing of motors.
And this one is after we connected the distance sensors, "the eyes" of the robot.
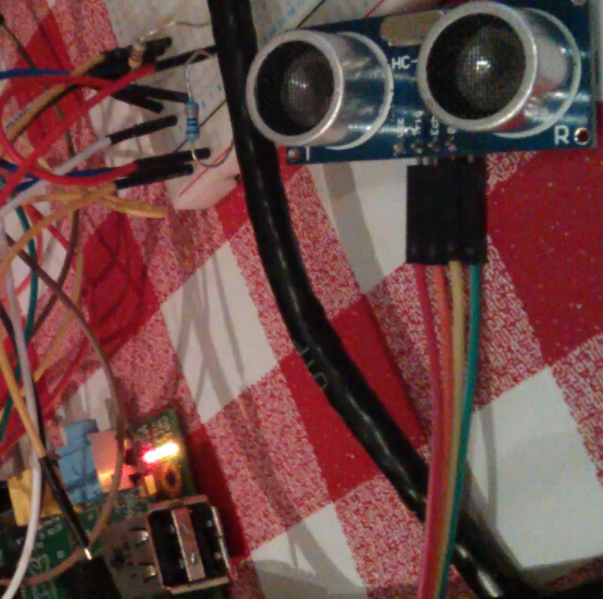
After all that we had to write a simple Python code, that receives the sensor data from robot via wi-fi (through the usb we attached to it), and controls the logic on what to do in case something appears on its way, along with its motors for direction.